Inverse Kinematics for Barrett Hand
Posted: 02 Apr 2016, 01:19
Hi there,
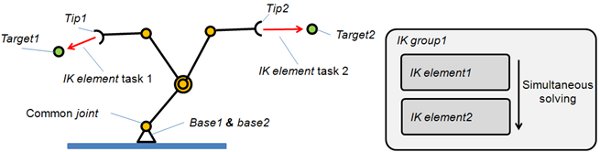
I have an application where I've collected many different 3-D positions of fingertip points from moving the Barrett Hand. I'm now working on the inverse problem, of moving the hand to the collected positions. The problem is kind of similar to the scenario in the tutorials: http://www.coppeliarobotics.com/helpFil ... asics6.jpg
In the current scene, I've inverted the Barrett Hand so that fingerTip1 is defined to be the model base. I place this base at one of the given positions and orientations, and then perform simultaneous IK on the remaining 2 fingers (0 and 2), and use "inversePivot1" to control rotation of the hand from the initial contact spot. Here's an image/video of what it looks like:
https://drive.google.com/folderview?id= ... sp=sharing
For the IK, I have X,Y,Z, Gamma enabled, and I'm using the DLS solver. The problem is that the process very rarely succeeds - it often gets stuck like the poses in that folder. Is it just a matter of playing with the IK weights from here? I could always try expanding the search a bit more around the object, but this seemed like the simplest approach.
Matt
I have an application where I've collected many different 3-D positions of fingertip points from moving the Barrett Hand. I'm now working on the inverse problem, of moving the hand to the collected positions. The problem is kind of similar to the scenario in the tutorials: http://www.coppeliarobotics.com/helpFil ... asics6.jpg
{kind=link}
In the current scene, I've inverted the Barrett Hand so that fingerTip1 is defined to be the model base. I place this base at one of the given positions and orientations, and then perform simultaneous IK on the remaining 2 fingers (0 and 2), and use "inversePivot1" to control rotation of the hand from the initial contact spot. Here's an image/video of what it looks like:
https://drive.google.com/folderview?id= ... sp=sharing
For the IK, I have X,Y,Z, Gamma enabled, and I'm using the DLS solver. The problem is that the process very rarely succeeds - it often gets stuck like the poses in that folder. Is it just a matter of playing with the IK weights from here? I could always try expanding the search a bit more around the object, but this seemed like the simplest approach.
Matt