Joint (acting as position control motor) only works at fast speeds
Posted: 15 Feb 2018, 15:26
I've got a robot weighing about 13kg in my simulation* using the bullet 2.78 physics engine and V-REP 3.5 latest version, which has a child object (amongst other child objects) of a joint with motor enabled and control loo-p enabled, I set this joint to have a max torque of around 8e4 Nm to give plenty more torque than I should ever need. This joint has a respondable dynamic convex compound shape (1.5kg or so )as a child, that shape has another joint as a child, the child of this joint is a shape (1 kg ish) (again complex compund), which has a dummy as it's child. As far as I know one can't just have a dummy childed to a joint, a shape must go between them I think, hence why the dummy isn't connected sstraight to the second joint. Overall these joints and shapes act as a bit like a SMORES http://www.modlabupenn.org/2012/10/19/smores/ or symbrion https://i.ytimg.com/vi/aZYvNJNWE5M/maxresdefault.jpg robot unit. The dummy is supposed to connect to another dummy (on a dummy which is the child of the main body of another robot, sort of like the back port on a SMORES, see picture) on a second robot and then be able to lift that other robot up and over, the second joint lets it be turned around once lifted.
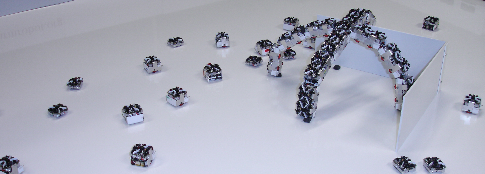
But when I try to do this with a slow and realistic rotation speed (about 6 degrees per second) for the first joint there is no lifting action, as if somehow the force isn't being transmitted, depsite ample torque being provided by the hinge joint. At 30 deg/sec it also fails, but at 90 degrees per second lifting seems to happen, except this is unrealistic for the hardware I want to simulate. How can I get this system to work properly? I've been trying to reduce the mass of the bodies of the robot units as much as possible, while making the mass of the two shapes in the joint chain as high as posible to enable them to transmit force properly, but I can't seem to manage to find any sweetspots where this will work. I can't make some robots lighter weight than others because any unit has to be able to lift any other (that is with suitable counter balancing in the form of further units docked to the back of any module which is lifting it's hinge), and even if I can get one unit to lift then I still face the problem of scaling it up for a robot to lift a chain of several others docked to it's front. I'm looking towards things a bit like the formation shown in the attached image http://www.eggshell-robotics.com/pictur ... rch_eu.png . I don't need perfectly true physics, as evidenced by my altering masses until such a point that things work, but do need to be able to get robots to dock and undock and lift each other as desired.
Thanks
*real things are under a kg but V-REP doesn't handle small masses well
{kind=link}
But when I try to do this with a slow and realistic rotation speed (about 6 degrees per second) for the first joint there is no lifting action, as if somehow the force isn't being transmitted, depsite ample torque being provided by the hinge joint. At 30 deg/sec it also fails, but at 90 degrees per second lifting seems to happen, except this is unrealistic for the hardware I want to simulate. How can I get this system to work properly? I've been trying to reduce the mass of the bodies of the robot units as much as possible, while making the mass of the two shapes in the joint chain as high as posible to enable them to transmit force properly, but I can't seem to manage to find any sweetspots where this will work. I can't make some robots lighter weight than others because any unit has to be able to lift any other (that is with suitable counter balancing in the form of further units docked to the back of any module which is lifting it's hinge), and even if I can get one unit to lift then I still face the problem of scaling it up for a robot to lift a chain of several others docked to it's front. I'm looking towards things a bit like the formation shown in the attached image http://www.eggshell-robotics.com/pictur ... rch_eu.png . I don't need perfectly true physics, as evidenced by my altering masses until such a point that things work, but do need to be able to get robots to dock and undock and lift each other as desired.
{kind=link}
Thanks
*real things are under a kg but V-REP doesn't handle small masses well