Typically: "How do I... ", "How can I... " questions
-
lukin558
- Posts: 3
- Joined: 18 Jan 2018, 08:09
Post
by lukin558 »
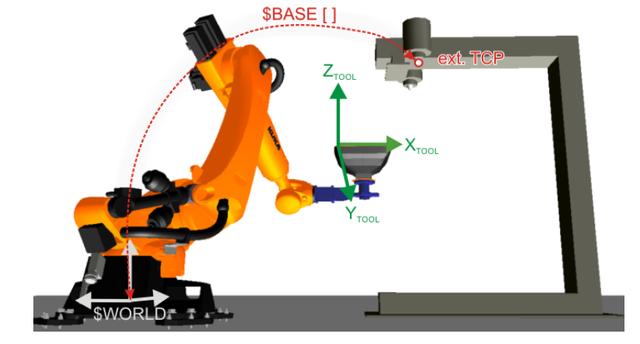
How to implement the application of external TCP?
For example, a robot arm grabs an irregular object Grinding a circle of trajectory(use path) on a fixed grinding wheel.
At this time, the grinding wheel is fixed and the robot arm is moving.
-
lukin558
- Posts: 3
- Joined: 18 Jan 2018, 08:09
Post
by lukin558 »
Thank you for answering my questions.
I tested model is ABB IRB4600 from vrep robot library