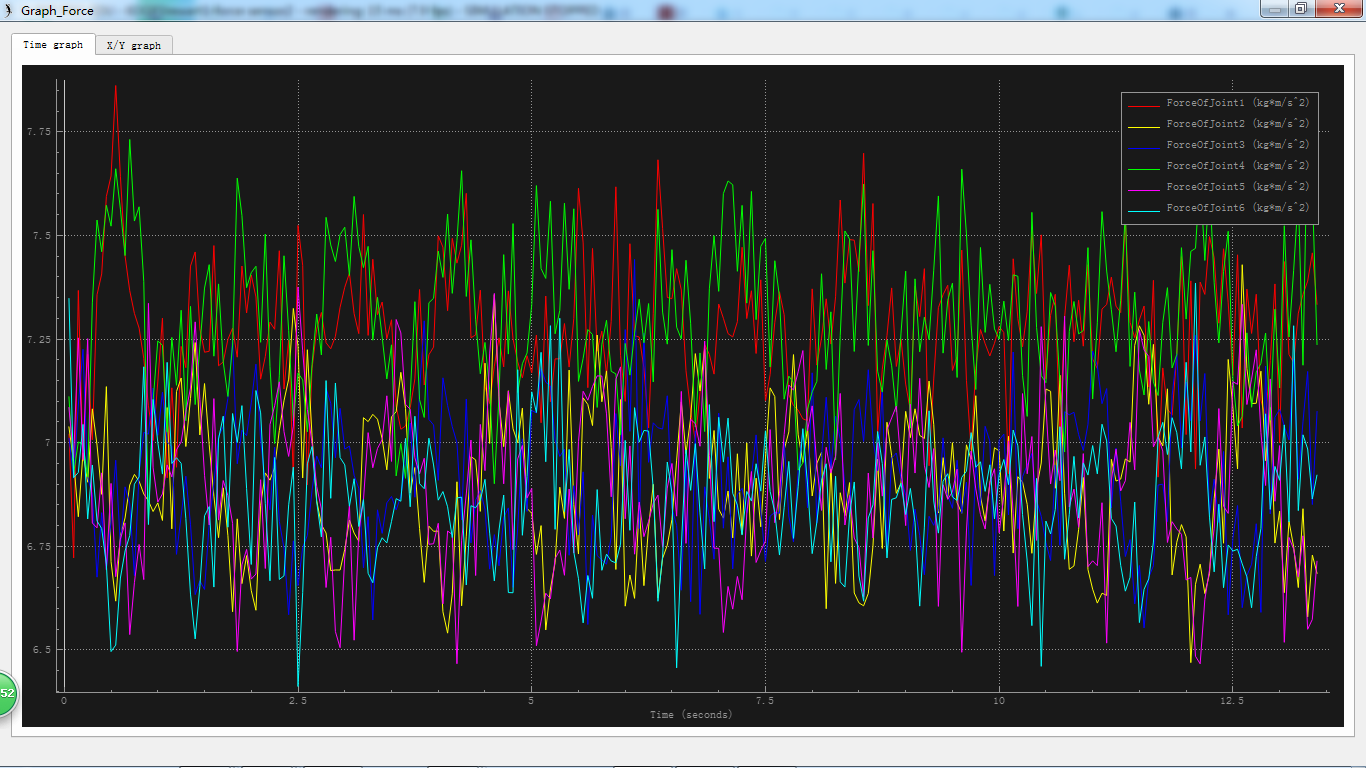
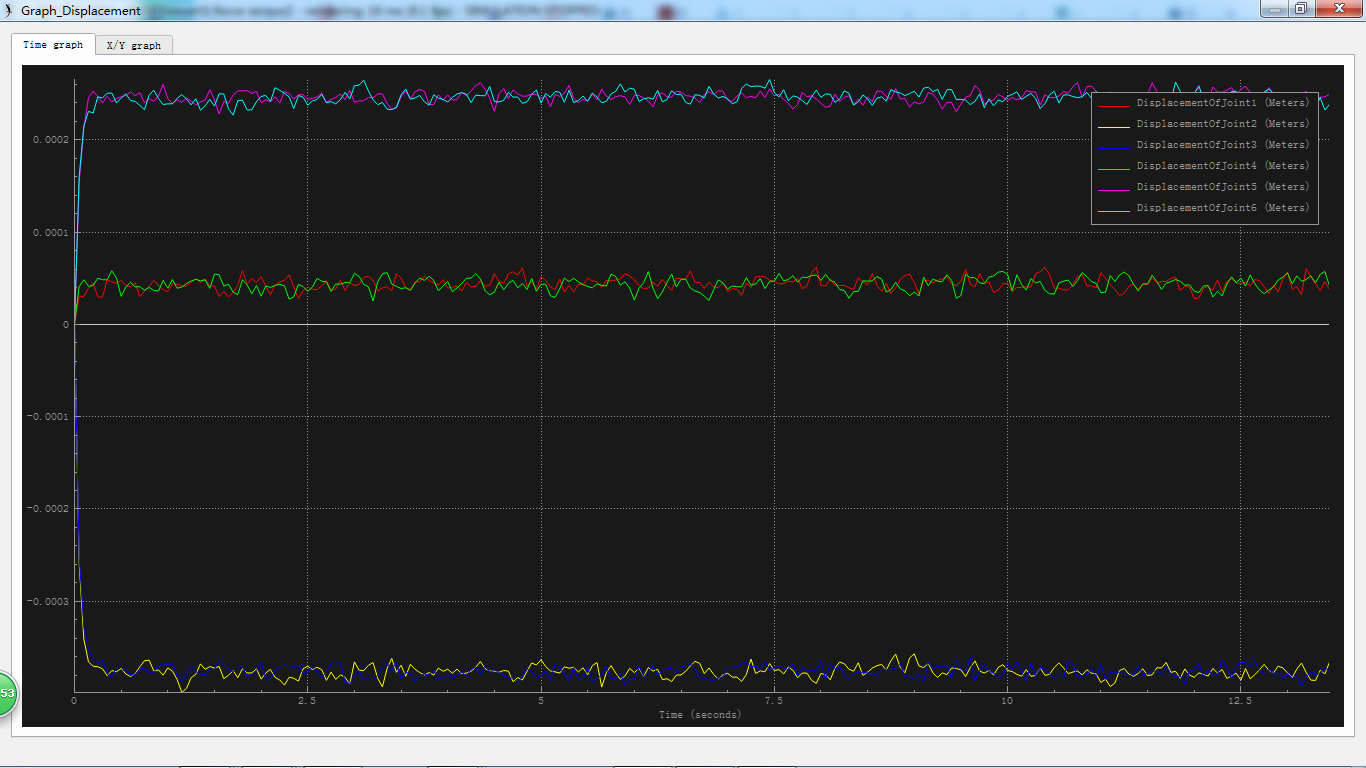
I constructed a model for 6-DOF Stewart paralle mechanism in V-rep to accomplish dynamics simulation. 6 force sensors are used to measure the force between 6 cylinders and top platform. The model can operate in my desired pattern, but I guess the output from displacement and force sensors is wrong when the model is static. The result from sensors are displayed as follows:
Your stewart platform seems to be quite nice. I don't see any obvious problem. However, make sure of following:
The platform has a dimension of almost 1 meter in height. Is that intended? If yes, remember that if you want to move it fast, this can generate tremendous forces in the joints. Most engines will do that with larger errors (unless you adjust several parameters)
Use the Vortex engine if possible, since it will give you best results in most situations.
Are the link masses/inertias correct? With engines that are different from Vortex, you should not have mass ratios of more than 1/10. Same with inertias.
Is your IK calculation correct, or can it produce unwanted constraints?
coppelia wrote: ↑11 May 2018, 07:36
Your stewart platform seems to be quite nice. I don't see any obvious problem. However, make sure of following:
The platform has a dimension of almost 1 meter in height. Is that intended? If yes, remember that if you want to move it fast, this can generate tremendous forces in the joints. Most engines will do that with larger errors (unless you adjust several parameters)
Use the Vortex engine if possible, since it will give you best results in most situations.
Are the link masses/inertias correct? With engines that are different from Vortex, you should not have mass ratios of more than 1/10. Same with inertias.
Is your IK calculation correct, or can it produce unwanted constraints?
Cheers
Thank you so much! I have solved my problem though transforming to vortex engine. The calculation result is very precise and same with the result of our model in Adams.