https://www.dropbox.com/s/mr7euyfyhatc9 ... .pdf?dl=0
I implement the code in Matlab and it works pretty fine and you can see the result and its simulated trajectory
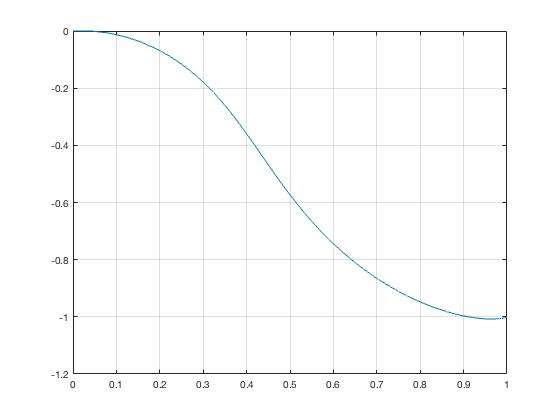 and here you can see if you want the implemented Matlab code here https://www.dropbox.com/s/pndu60m4qepbh ... ove.m?dl=0
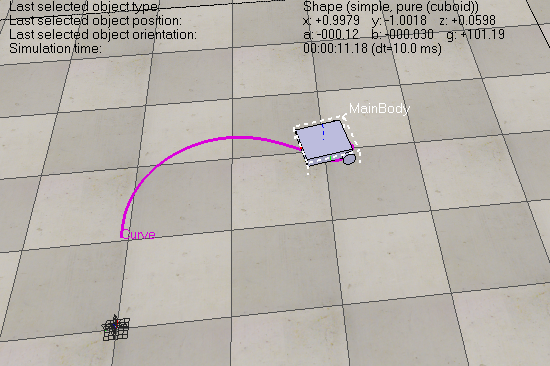
and here you can see if you want the implemented Matlab code here https://www.dropbox.com/s/pndu60m4qepbh ... ove.m?dl=0Then I try to use the same code in vrep and I create a script at the simulated model that uses this algorithm. I upload the vrep file to check it if you want
https://www.dropbox.com/s/1yavvph02hdxt ... a.ttt?dl=0
The problem is that even it gets really close to the target area, I think the model slips and it misses the target so it gets into an endless loop
Could you please help me about this physics problem and suggest me something I tried the static as you told me before but it did not move at all. I tried different engines as you wrote to another member but nothing.
I would be really grateful if you share your experience to me
Cheers