Search found 10 matches
- 11 Mar 2023, 10:16
- Forum: General questions
- Topic: confused by some similar commands
- Replies: 1
- Views: 241
confused by some similar commands
hi! Recently, I used MATLAB to control coppelliasim based on zmq remote api, but I was confused by some similar commands. My question is as follows: What is the difference between sim.getJointPosition and sim.getJointTargetPosition? What is the difference between sim.setJointPosition and sim.setJoin...
- 18 Mar 2022, 09:49
- Forum: General questions
- Topic: Install versions 4.2 and 4.3 at the same time
- Replies: 1
- Views: 213
Install versions 4.2 and 4.3 at the same time
HELLO!
Can I install coppeliasim v4.2 and v4.3 on my computer at the same time? Can they exist at the same time? Will it have any bad impact?
THANKS!
CHEERS!
Can I install coppeliasim v4.2 and v4.3 on my computer at the same time? Can they exist at the same time? Will it have any bad impact?
THANKS!
CHEERS!
- 08 Jan 2022, 12:59
- Forum: General questions
- Topic: How can I better understand and use synchronous operation
- Replies: 1
- Views: 472
How can I better understand and use synchronous operation
hello! I carefully read the contents related to synchronous operation on the website of remote API modus operandi(https://www.coppeliarobotics.com/helpFiles/en/remoteApiModusOperandi.htm#synchronous), but I still didn't understand it deeply enough that I couldn't flexibly use synchronous operation. ...
- 08 Jan 2022, 12:49
- Forum: General questions
- Topic: Joint angle limit setting of Franka robot model
- Replies: 1
- Views: 484
Joint angle limit setting of Franka robot model
hello, When I set the angle limit for the joints of Franka robot model, I found that the default limit was inconsistent with the limit given on Franka's official website. The first picture is the limit given by Franka's official website, and the second and third pictures are the default angle limit ...
- 04 Jan 2022, 02:38
- Forum: General questions
- Topic: After setting the passive mode, the robot's joints fall
- Replies: 2
- Views: 331
Re: After setting the passive mode, the robot's joints fall
Hello,
thank you guys! you are really helpful!
thanks again!
Cheers
thank you guys! you are really helpful!
thanks again!
Cheers
- 31 Dec 2021, 13:41
- Forum: General questions
- Topic: After setting the passive mode, the robot's joints fall
- Replies: 2
- Views: 331
After setting the passive mode, the robot's joints fall
Hello
When I set the robot's joints to passive mode,after the simulation starts,all the joints are scattered on the ground.
I don't know why.
The results are shown in the figure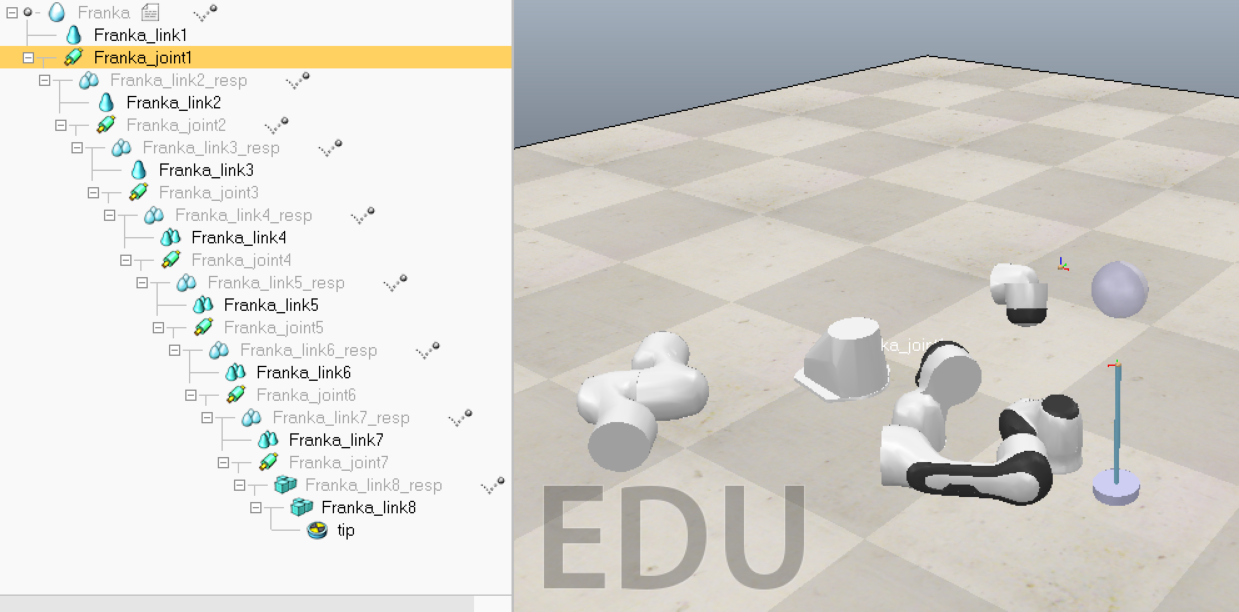
Cheers
Thanks
When I set the robot's joints to passive mode,after the simulation starts,all the joints are scattered on the ground.
I don't know why.
The results are shown in the figure
Cheers
Thanks
- 18 Nov 2021, 03:25
- Forum: General questions
- Topic: How to use simulation data to control real robots
- Replies: 2
- Views: 5982
Re: How to use simulation data to control real robots
thanks!
Thank you. Your reply is very timely and helpful to me!
cheers!
Thank you. Your reply is very timely and helpful to me!
cheers!
- 17 Nov 2021, 14:28
- Forum: General questions
- Topic: How to use simulation data to control real robots
- Replies: 2
- Views: 5982
How to use simulation data to control real robots
Hi, my question is: I have already simulated a robot (e.g. dobot magician or kuka LBR iiwa 7 R800) in coppeliasim and achieved satisfactory results, how can I use the simulated data to control a real robot (e.g. dobot magician or kuka LBR iiwa 7 R800) in the real world? Is there a general approach o...
- 26 May 2021, 12:35
- Forum: General questions
- Topic: Dummy's problems of following an open path
- Replies: 2
- Views: 3162
Re: Dummy's problems of following an open path
hello!
thanks!you guys are really helpful!
cheers!
thanks!you guys are really helpful!
cheers!
- 25 May 2021, 12:41
- Forum: General questions
- Topic: Dummy's problems of following an open path
- Replies: 2
- Views: 3162
Dummy's problems of following an open path
HELLO! I created an open path and added a dummy to make the dummy move along the path. I found that the dummy does not stop after moving from the start of the path to the end of the path. Instead, it returns to the starting point and repeats the previous movement. May I ask How can we make the dummy...