Search found 1014 matches
- 31 Mar 2020, 16:22
- Forum: General questions
- Topic: open62541 OPC UA Client
- Replies: 4
- Views: 1413
Re: open62541 OPC UA Client
Yes! A plugin looks the right way to do it. The BlueZero (as well as CustomUI, OMPL, ROS, and many others) uses a high level framework (libPlugin) to generate Lua/C++ integration code. Documentation for it is just the README files contained in the git repository subdirectories, the example plugin si...
- 31 Mar 2020, 08:47
- Forum: General questions
- Topic: How to adjust Lidar Data looks correct
- Replies: 2
- Views: 1001
Re: How to adjust Lidar Data looks correct
See components/sensors/Hokuyo_URG_04LG_UG01_ROS's sensing script for an example of reading lidar distances.
Check also this discussion.
Check also this discussion.
- 31 Mar 2020, 08:38
- Forum: General questions
- Topic: How to add Delay in python script in simulation time
- Replies: 9
- Views: 2059
Re: How to add Delay in python script in simulation time
Synchronous mode is described at:
- B0 Remote API: B0-based remote API modus operandi (synchronous)
- Legacy Remote API: Remote API modus operandi (synchronous)
- 30 Mar 2020, 19:33
- Forum: General questions
- Topic: Develop plugin for Coppelia Sim using LibPlugin
- Replies: 15
- Views: 3320
Re: Develop plugin for Coppelia Sim using LibPlugin
Qt for Open Source development is free and available for all platforms.
- 30 Mar 2020, 15:53
- Forum: General questions
- Topic: Dummy joint break apart
- Replies: 3
- Views: 838
Re: Dummy joint break apart
Dittocoppelia wrote: ↑30 Mar 2020, 10:09 make sure you read the design considerations considerations 6-8 on the Designing dynamic simulations page.
- 27 Mar 2020, 11:19
- Forum: General questions
- Topic: How to parallelize a scene
- Replies: 1
- Views: 421
Re: How to parallelize a scene
Maybe it depends on the automatic name adjustment mechanism.
See Accessing objects programmatically (from associated code).
See Accessing objects programmatically (from associated code).
- 26 Mar 2020, 08:46
- Forum: General questions
- Topic: Object handle error
- Replies: 4
- Views: 1073
Re: Object handle error
You say you have cubes with names Cube_1, Cube_2, Cube_3 ... Cube_100.
Your code will call sim.getObjectHandle with arguments Box0, Box1, Box2, ... Box100.
Does that ring a bell?
Your code will call sim.getObjectHandle with arguments Box0, Box1, Box2, ... Box100.
Does that ring a bell?
- 25 Mar 2020, 22:59
- Forum: General questions
- Topic: The joint made a little movement at the begginning of simulation.
- Replies: 6
- Views: 1999
Re: The joint made a little movement at the begginning of simulation.
Same thing. You can change the values if you select Configuration to Customized
- 25 Mar 2020, 22:38
- Forum: General questions
- Topic: The joint made a little movement at the begginning of simulation.
- Replies: 6
- Views: 1999
Re: The joint made a little movement at the begginning of simulation.
You mean the first three on the right in the Simulation settings dialog?
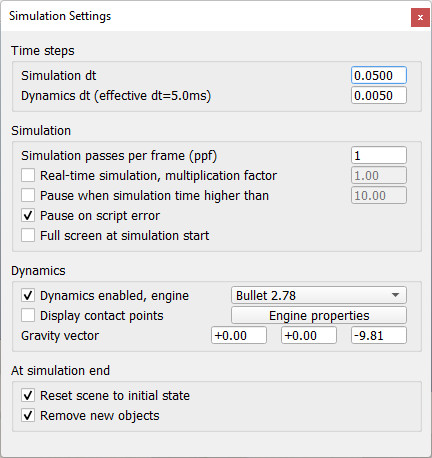
You have to select custom dt to be able to change those.
You have to select custom dt to be able to change those.
- 25 Mar 2020, 21:56
- Forum: General questions
- Topic: Aspects of hexapod
- Replies: 3
- Views: 675
Re: Aspects of hexapod
Is the base static?