i am new to Vrep. Maybe the question is a little confused.
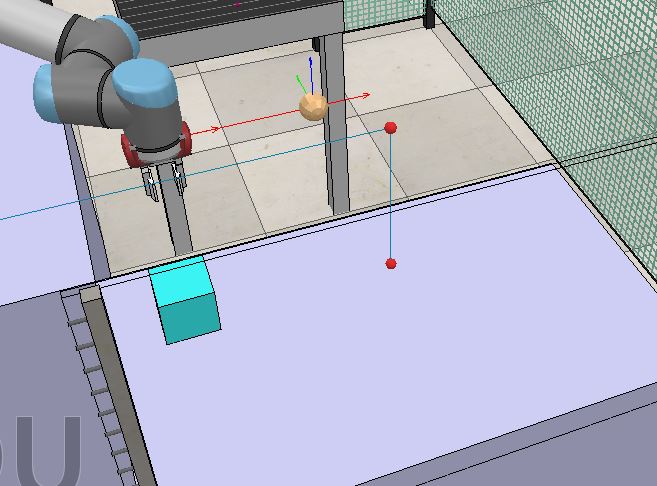
Before the simulation the robot is at the position as picture(1) shows.
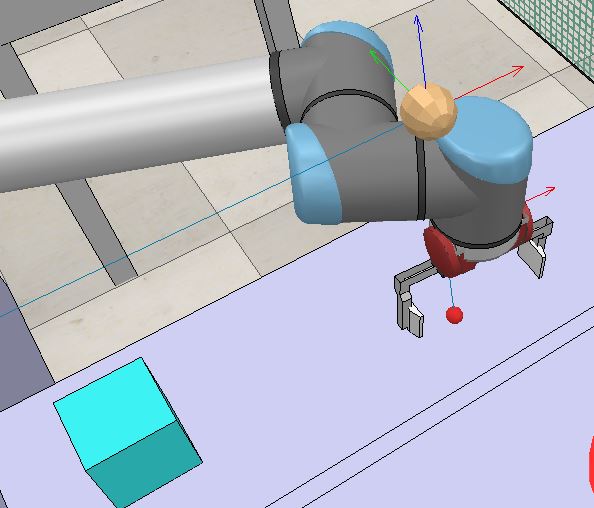
After i click "run", the robot will move down to another position as picture(2) shows. It seems there is a magnetic field here. It doesn't follow the TargetDummy as we can see. But fast it backs to the position of TargetDummy and the follow the path.
But if I move the Path to another position, where is far away here, it can work normally.
Is there any potential reasons here?I think it may be relative to the gripper. Thanks a lot in advance!
difficult to say with the little information you give. How is the robot controlled? Via IK? What is the chosen IK solver? Is it a damped one? Is the robot dynamically enabled? Are the joints in IK mode with hybrid operation? What happens if the gripper is removed? (you say that maybe it is caused by the gripper). Is it possible that you run into joint limits?
If your robot is dynamically enabled, are you sure the controller is able to go at that speed? (maybe adjust the joint's Upper velocity limits and/or maximum force/torque).
It worked well in the first loop, but when my code updated the data again(means to grasp second ,third box), it was initialized during the second crawl. This problem will appear.
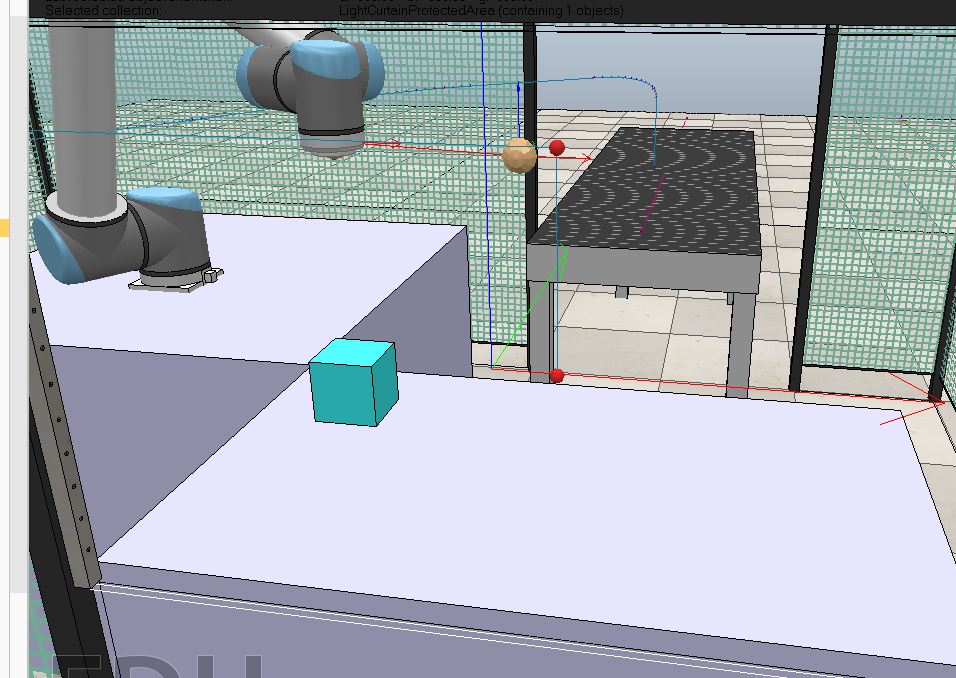
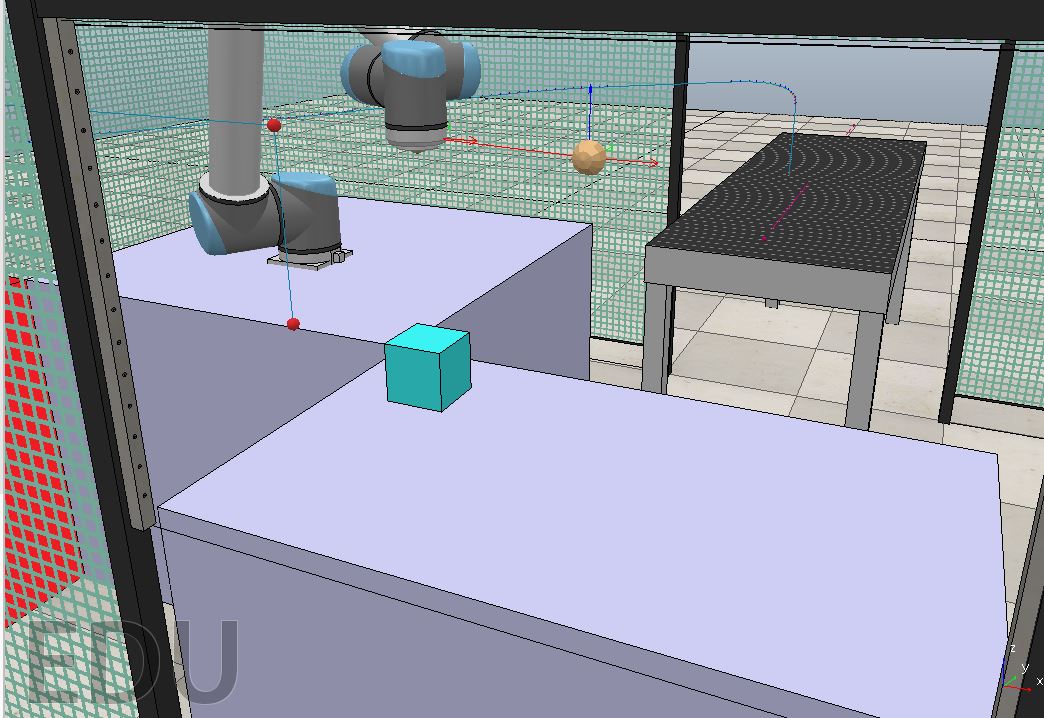
I remove the gripper. But the problem exists still as showed in first picture . Then I move the several paths closer to the UR10 as showed in second picture. The Problem disappears. Is it because the working radius of the manipulator is exceeded, or the speed and torque factors? I don't know why.
Could it be that you run into some joint limits after the first run? E.g. in the first run, the manipulator maybe rotates almost by 360 degrees, and then in the second run (without stopping/restarting the simulation), the robot can't further go into that direction?
IK works always by going in a straight line in cartesian space. Ik won't perform any path planning.
oh an again, a picture does't help much for checking for such kind of problems, maybe you could post a minimalistic scene that illustrates your problem.
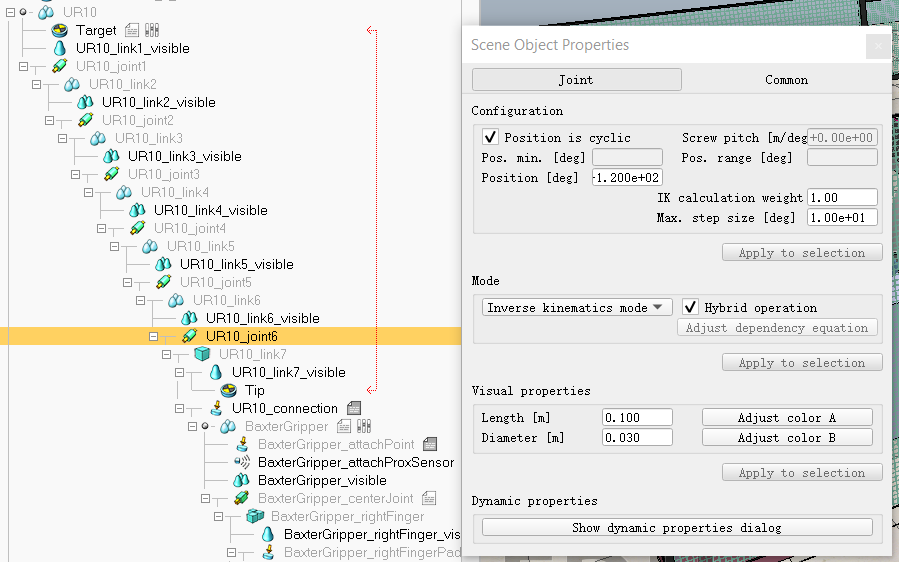
The problem is as I explained previously: you drive your robot exclusively via IK. By having all 6 constraints enabled (position and orientation). Eventually, some joints will be close to a joint limit and IK won't work anymore (remember, IK will try to move in a straight line in Cartesian space), since some joints will be blocking. To prove that, set all of your joints as cyclic. Then those joint limits will be gone.
coppelia wrote: ↑26 Jun 2020, 11:05
The problem is as I explained previously: you drive your robot exclusively via IK. By having all 6 constraints enabled (position and orientation). Eventually, some joints will be close to a joint limit and IK won't work anymore (remember, IK will try to move in a straight line in Cartesian space), since some joints will be blocking. To prove that, set all of your joints as cyclic. Then those joint limits will be gone.
Cheers
Hello,
thanks for your answer. I have tried to set all the six joints , which are cyclic. But the problem exists still.
Does it work well in your test?Is there something wrong in my settings?
It runs relatively fine here. The way you control the robot, its speed, etc. is quite unusual. Also, your pick and drop locations are very close to singularities, it is always dangerous to run via IK in those situations.
Additionally, we haven't looked into your code at all, since that would be too much effort for us to understand/debug. For that reason it is always a good idea to break-down a problem into a minimalistic scene that can easily be debugged and understood (sometimes this is unfortunately not possible)