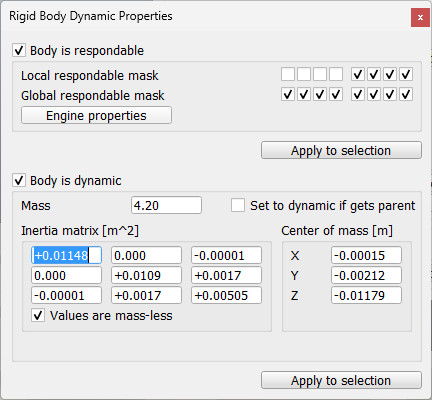
My question has to do with inertia frames of shapes. I imported a shape from SolidWorks, with calculated COM and moments of inertia. In Coppelia, I'm assuming the inertia frame is the same as the shape frame. However, my inertia frame is different in Solid. So I would like to use the 'Pos./orient. of inertia frame & COM relative to shape frame' option in order to find the right inertia frame. Here's an image of the shape dynamic properties:
So as you can see the only fields under 'Pos./orient. of inertia frame & COM relative to shape frame' are X, Y, Z [m] and alpha, beta, gamma [deg]. I'm assuming that's the position and orientation of the inertia frame relative to the shape frame. I don't see how I should specify the COM relative to that frame. It would mean a lot to me if you could help me with this issue.
a mesh imported via most CAD fileformats doesn't have a frame attached: it is just a collection of points in 3D space. Also, when importing a mesh, the resulting shape will have its bounding box automatically computed, this means the shape's frame is random (well, it will try to minimize the size of the bounding box, which is aligned with the shape's frame).
If you need to set the inertia matrix in an absolute manner, click Set inertia matrix and COM relative to absolute frame. If you want to set the inertia matrix relative to another frame, you will have to first move/reorient the sape: e.g. if you want to set the inertia matrix relative to the shape's relative frame, then move the shape to the identity transformation, apply the inertia, then move the shape to its original pose.
Yes, the inertia matrix can be set in an absolute manner via Set inertia matrix and COM relative to absolute frame. But, how do I set the inertia frame? The only thing I can find is to set it in relation to the shape frame, via Pos./orient. of inertia frame & COM relative to shape frame as I mentioned above. I want my inertia frame to start at the center of the joint that rotates the object. So I assume I can set the inertia matrix and the COM relative to the absolute frame, and then set the inertia frame itself relative to the shape frame?
If you need to set the inertia frame of a shape relative to a specific joint, then do following:
copy the shape and the joint, paste them into another scene. Delete the shape in the original scene.
attach the shape to the joint
move the joint to the origin (i.e. identity transformation)
set your inertia matrix for the shape (in an absolute manner). Absolute will be relative to the joint's frame, since the joint is located at the origin.
copy the joint and shape back into the original scene
apply the same position/orientation to the joint copy as the original joint
now your shape has the correct inertia and is back in place