Hey,
I have some robot:
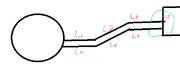
In links L3,L6 and L7 what sould be the hierarchy?
A change in the angle of link L3 will change the angle of link L7 and also a change in the angle of link L6 will change link L7.
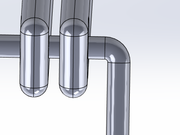
Image of links L3, L6, L7 in 3D:
I manage to cause a change in angle only according to one link out of the 2.
How can I solve this?
Thanks.
you have a loop closure situation. First you need to decide if your simulation is kinematic or dynamic. The approach is not the same:
Kinematic simulation: you need to handle the situation using forward or inverse kinematics. Have a look at the demo scenes in scenes/kinematics/, where some of the examples are also looped.