Joint angle limit setting of Franka robot model
Posted: 08 Jan 2022, 12:49
hello,
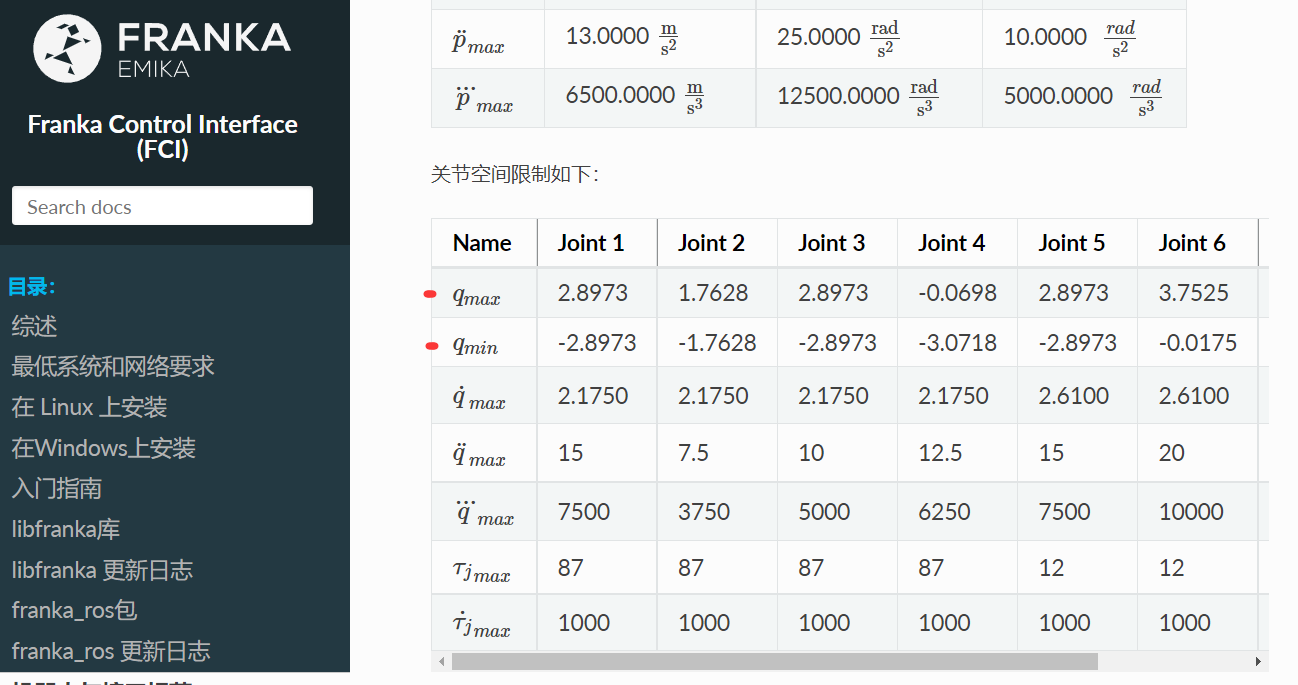
When I set the angle limit for the joints of Franka robot model, I found that the default limit was inconsistent with the limit given on Franka's official website.
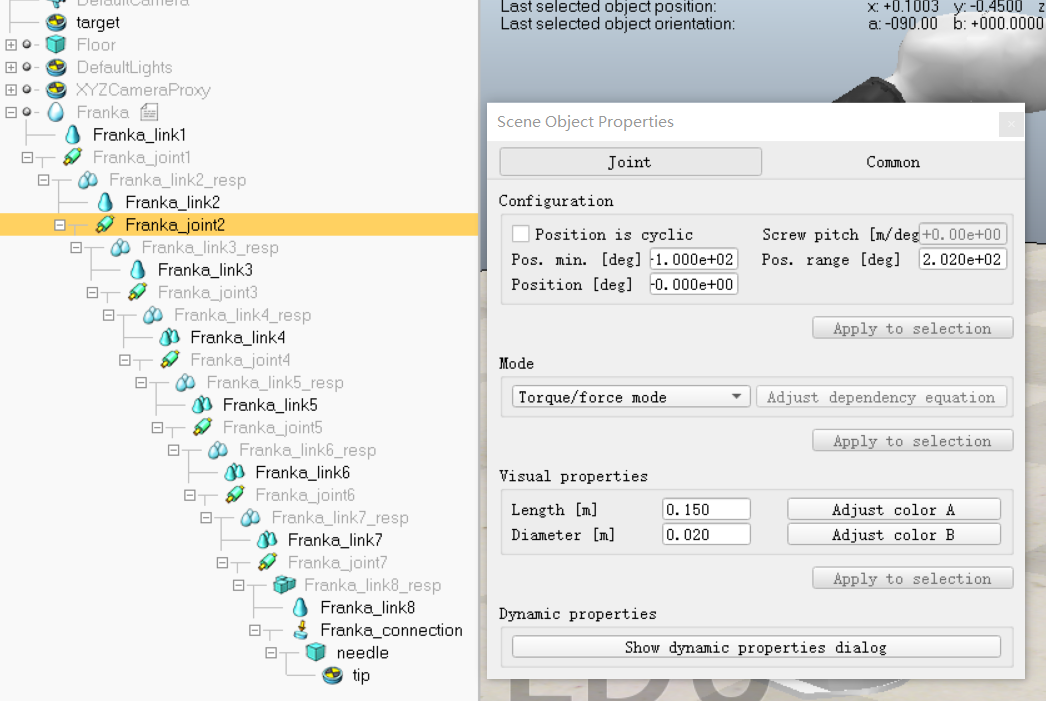
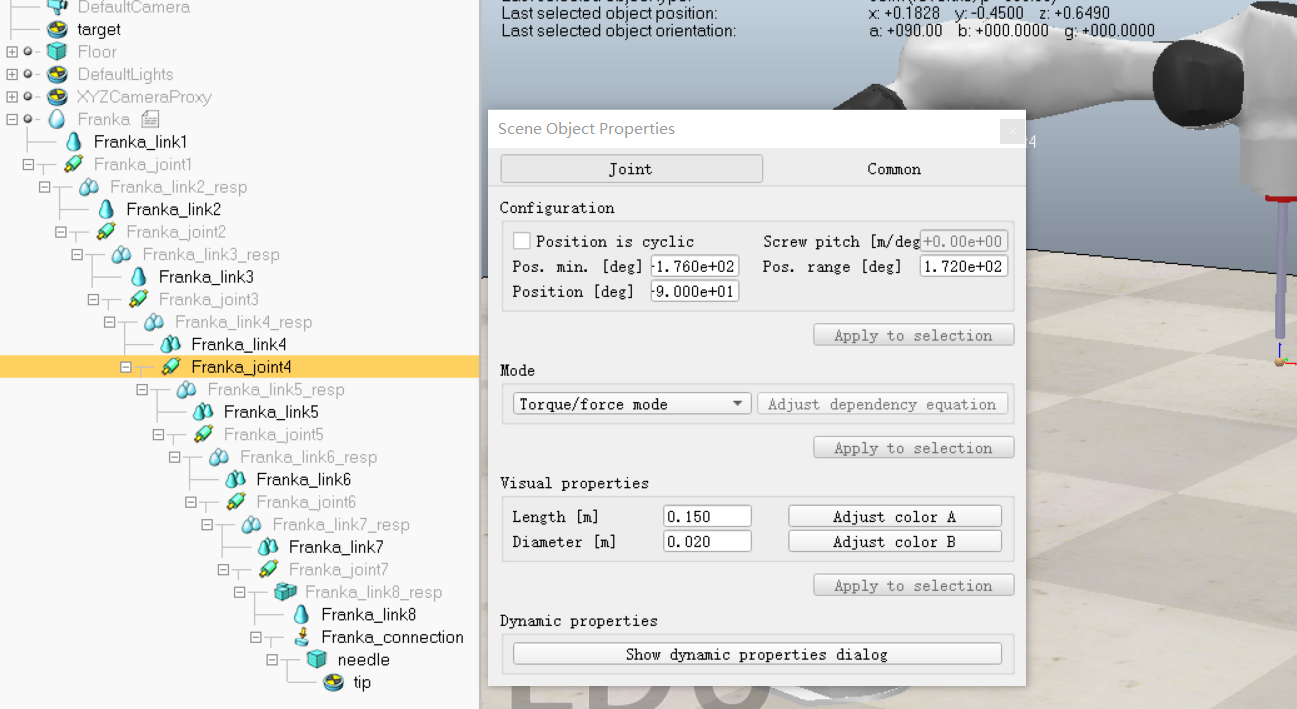
The first picture is the limit given by Franka's official website, and the second and third pictures are the default angle limit of Franka robot model joints 2 and 4.
When I changed the angle limit of each joint, I found that it would have a great impact on the simulation results. I don't know why. Can you help me explain the setting principle of joint angle limit of robot model in coppeliasim?
cheers!
thanks!
When I set the angle limit for the joints of Franka robot model, I found that the default limit was inconsistent with the limit given on Franka's official website.
The first picture is the limit given by Franka's official website, and the second and third pictures are the default angle limit of Franka robot model joints 2 and 4.
When I changed the angle limit of each joint, I found that it would have a great impact on the simulation results. I don't know why. Can you help me explain the setting principle of joint angle limit of robot model in coppeliasim?
cheers!
thanks!